The network learns every time it operates.
Across the Tactical CV Network, models retrain on operational data in the field. Improvements propagate across every node as encrypted weight updates. Raw data never leaves the site.
A capability gap, not a tooling gap.
In bandwidth-constrained and contested environments, not transmitting terabytes of raw footage is an operational capability in itself. The conventional approach fails on three counts.
Models go stale.
CV models are trained centrally, deployed once, updated rarely. They degrade as threats evolve and environments shift. The data that would fix them can't leave the field.
Operational data goes to waste.
Every site generates more sensor data than anyone can review. Centrally there is a chronic shortage of the footage that would strengthen models. No conventional toolchain bridges this gap.
Vendor models create dependency.
The default is the sensor vendor's model: their data, their update cycle. This recreates at the AI layer the dependency armed forces worked to escape at the hardware layer.
Four dimensions of operational advantage.
Speed, accuracy, reach, and resilience. Each is a direct consequence of training where the data already is, instead of shipping it back to a central model.
A novel threat becomes a network-wide capability within one operational window.
- 1 Observe: a camera flags a drone type it has never seen
- 2 Confirm & retrain: an operator confirms in a few clicks; the model retrains on-site
- 3 Redeploy: every node recognises it within the same operational window
Active learning auto-selects the high-value frames; the Ground Node retrains locally and verifies against live feeds before the model is promoted.
Trained on that environment, that season, that threat profile.
- Real operational data: accuracy improves as the operation runs
- Not a central training set that only approximates it
Each node adapts to its local conditions; the federation reconciles those gains into a stronger shared model without anyone exchanging raw footage.
What one node learns, every node learns.
- One node learns: an arctic unit spots a drone type it has never seen
- Every node gains it: a coastal unit can flag the same drone, no footage shared
- Collective intelligence that compounds, which a centralised loop cannot deliver
Encrypted weight updates are federated across the network, model updates orders of magnitude smaller than the raw footage, which never leaves the node.
No uplink required. The link going down doesn't stop the mission.
- Connected: full federated training, staging, and observability
- Intermittent: operates autonomously, queues updates for next sync
- Disconnected: runs inference, captures data, trains locally. Nothing is lost.
Offline-first by design; compact weight updates sync on reconnect, with minimal bandwidth demand and emissions signature in contested environments.
Three components. One continuous improvement cycle.
Instead of moving data to the model, the model goes to the data. Each component has a distinct role; together they close the loop between what the network observes and what it learns.
Scaleout Edge Component 1
The sovereign control plane. Manages the model registry, federated training engine, fleet observability, and audit trail. Deployed in customer infrastructure. No external dependencies. Air-gap capable.

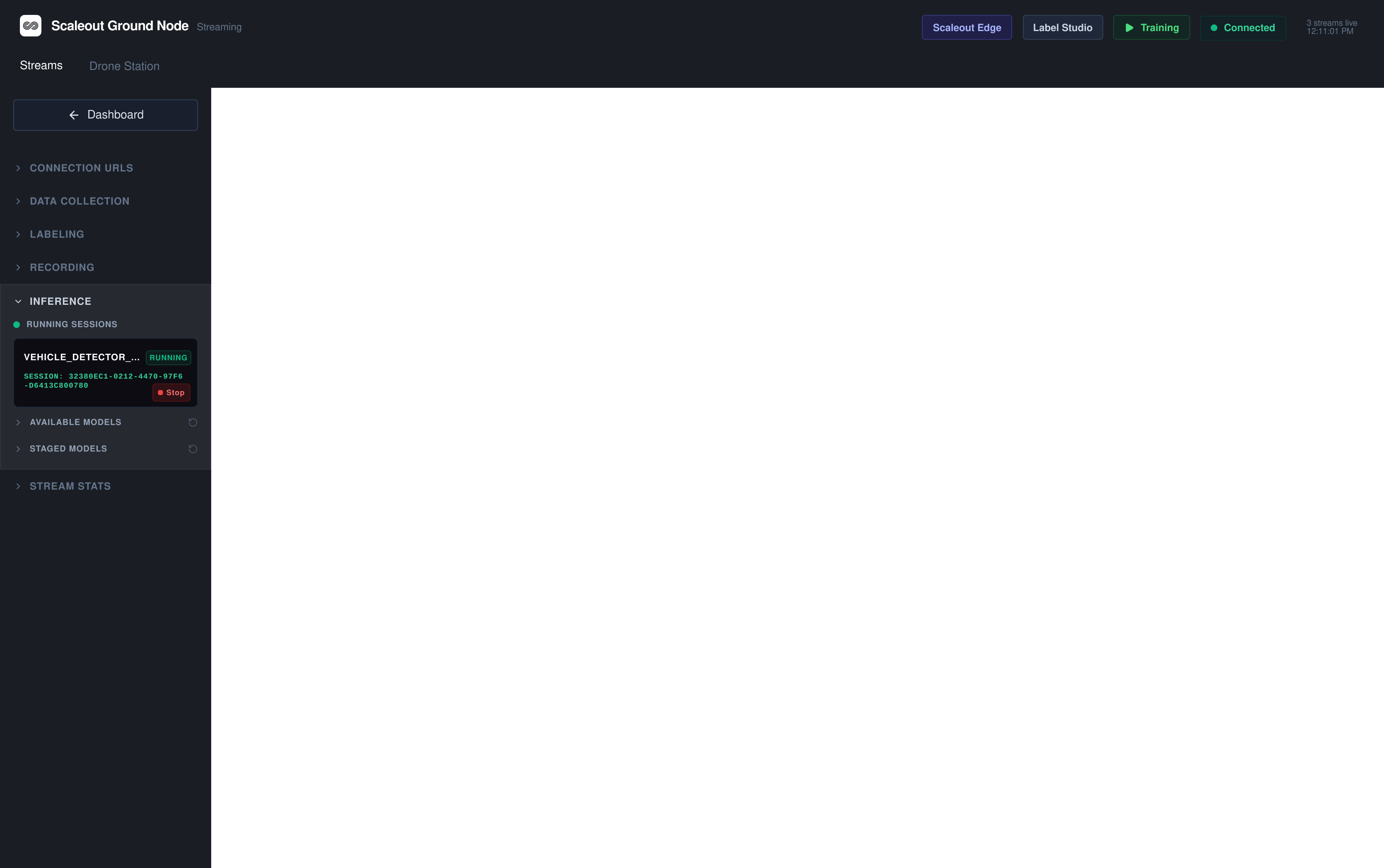
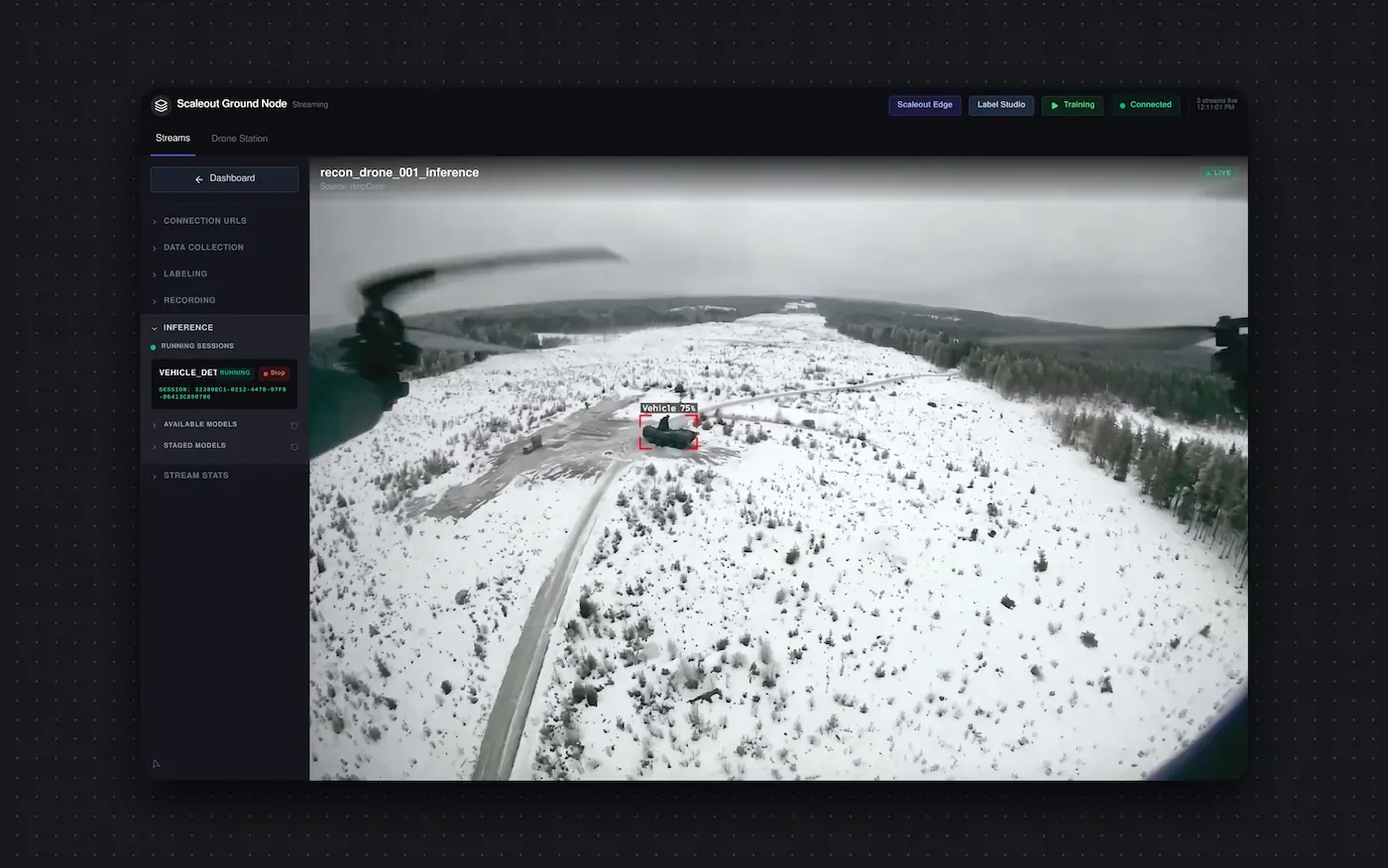
Ground Node Component 2
GPU-accelerated edge station at bases, ranges, and forward positions. Runs live inference, selects high-value data automatically, supports on-site annotation, and retrains models locally. No ML expertise required.

Edge AI Companion Component 3
Lightweight on-platform compute for drones, vehicles, and embedded sensors. Runs validated models autonomously without connectivity. Syncs detections and updated models with the nearest Ground Node when a link is available.
A continuous improvement cycle.
Every detection that exposes a gap contributes to a better model across the entire network. The cycle runs during the mission, not between deployments.
New detections feed the next round. The network improves continuously.
Powerful where it counts. Restrained where it matters.
Two deliberate boundaries: operators stay in control of what the network learns, and the system sits inside your existing ecosystem rather than replacing it.
A human confirms before the model learns.
A novel detection is never folded into the model on its own. An operator confirms it first, keeping your people in control of what the network learns, and how fast. Meaningful human control by design, not a policy bolted on afterwards. Detection and engagement decisions stay with your operators and your C2. The platform governs what the model learns, not what you do with it.
Augments your C2. Stays neutral on your sensors.
It extends existing command and control without replacing it, and works with any sensor manufacturer already in the field. Detections from heterogeneous sensors converge into one coherent operational picture, with no lock-in at the AI layer.
Your data. Your models. Your infrastructure.
Sovereignty enforced by architecture and backed by a full audit trail, not an access-control policy you have to take on trust.
Sovereignty by architecture, not by policy.
Designed for environments where raw data physically cannot leave the site, and every model decision must be auditable.
- Raw data never leaves the node
- No SaaS dependencies
- Models cryptographically signed with full lineage
- Weight updates hardened against inference (secure aggregation, privacy auditing)
Your models. Your strategy. Your update cycle.
Model ownership stays with the customer, not the sensor or platform vendor. The platform operationalises whatever you bring.
- Develop in-house or use open repositories
- Reference models for cUAS and ISR included
- Customer owns model strategy
The Path to Production
A staged deployment structure designed to go from initial evaluation to active field capability in approximately 12 months.
-
Stage 1 (~2 Mos) Lab Workbench
Establish baseline models, run local training, and prove core loops.
-
Stage 2 (~2 Mos) Field Validation
Deploy to active tactical test ranges under network stress.
-
Stage 3 (~6 Mos) Pilot & Tuning
Onboard field units and execute targeted geo-threat model tuning.
-
Stage 4 (Optional) Scale Fleet
Expand to 5-10+ sites to validate decentralised fleet learning.
-
Stage 5 (Ongoing) Production
Continuous operations with SLAs and complete customer handover.
Start with a 60-day Stage 1.
Establish the lab workbench, demonstrate the full workflow on real data, and jointly define the path to field validation. A staged route to capability rather than a large, centralised programme, with no commitment to scale until value has been demonstrated.